|
2015-09-05
|
Indeks |
|
for
samtlige 26 afsnit herunder |
|
klik på det ønskede
afsnit |
Startside
Forord
Oversigt
Forhistorien
Frankrigs fald
Dunkerque
Forsvarsstrategien
Seelöwe
Battle of Britain
Blitzen
Kontrafaktisk
Efterspillet
Offensiven 1941
Ledere
England
Ledere
Tyskland
Flytyperne
Radar - Enigma
RAF's
historie
Luftwaffe
Krigsspil
Kronologi
-
Tavle 1
Kronologi
- Tavle
2
Billedliste
Henvisninger
Ordliste
leksikon
Noter
- Kilder
Litteraturliste
Kommentarer
Korrektioner
Blogs
Send kommentarer:
leif.olsen@battleofbritain.dk
Radarsystemer.
Siden 1930'erne er der foregået en kraftig udvikling
indenfor radarteknikken. Der findes i dag en række
forskellige systemer inden for to hovedgrupper: Pulse
radar og CW radar. Det sidstnævnte CW (continious wawes) bruges ex. i
forbindelse med hastighedsmålinger på basis af doppler
effekten.
|
Indeks |
|
for
samtlige 26 afsnit herunder |
|
klik på det ønskede
afsnit |
Startside
Forord
Oversigt
Forhistorien
Frankrigs fald
Dunkerque
Forsvarsstrategien
Seelöwe
Battle of Britain
Blitzen
Kontrafaktisk
Efterspillet
Offensiven 1941
Ledere
England
Ledere
Tyskland
Flytyperne
Radar - Enigma
RAF's
historie
Luftwaffe
Krigsspil
Kronologi
-
Tavle 1
Kronologi
- Tavle
2
Billedliste
Henvisninger
Ordliste
leksikon
Noter
- Kilder
Litteraturliste
Kommentarer
Korrektioner
Blogs
|
Indeks |
|
for
samtlige 26 afsnit herunder |
|
klik på det ønskede
afsnit |
Startside
Forord
Oversigt
Forhistorien
Frankrigs fald
Dunkerque
Forsvarsstrategien
Seelöwe
Battle of Britain
Blitzen
Kontrafaktisk
Efterspillet
Offensiven 1941
Ledere
England
Ledere
Tyskland
Flytyperne
Radar - Enigma
RAF's
historie
Luftwaffe
Krigsspil
Kronologi
-
Tavle 1
Kronologi
- Tavle
2
Billedliste
Henvisninger
Ordliste
leksikon
Noter
- Kilder
Litteraturliste
Kommentarer
Korrektioner
Blogs
|
Indeks |
|
for
samtlige 26 afsnit herunder |
|
klik på det ønskede
afsnit |
Startside
Forord
Oversigt
Forhistorien
Frankrigs fald
Dunkerque
Forsvarsstrategien
Seelöwe
Sea Lion
Battle of Britain
Blitzen
Kontrafaktisk
Efterspillet
Offensiven 1941
Ledere
England
Ledere
Tyskland
Flytyperne
Radar - Enigma
RAF's
historie
Luftwaffe
Krigsspil
Kronologi
-
Tavle 1
Kronologi
- Tavle
2
Billedliste
Henvisninger
Ordliste
leksikon
Noter
- Kilder
Litteraturliste
Kommentarer
Korrektioner
Blogs
 Noter
Noter
|
Luftkrigen over England i 1940-41 (kaldet "Slaget om
England") var en krig alene mellem England og Tyskland. Luftkrigen
var sidste fase af
Slaget om Vesteuropa, som Hitler startede den 10. maj 1940. Efter
at have besejret Holland, Belgien og Frankrig i maj / juni, fortsatte Hitler med en luftkrig mod England.
Den varede til maj 1941. Den tabte han.
Radar og andre tekniske
hjælpemidler
i Slaget om England
| I teksten er: |
| RAF = Royal Air Force = det engelske
flyvevåben |
| Luftwaffe = det tyske flyvevåben |
Indledning
Dette afsnit af e-bogen indeholder en gennemgang af de
elektroniske systemer, der spillede en afgørende faktor i Luftkrigen
over England i 1940 - 41 - Battle of Britain og Blitzen.
Et markant eksempel på sådanne systemer er radar, der blev helt afgørende for udfaldet af Battle of Britain i
august - september 1940222.
Andre nye systemer i krigen var forskellige former for
radioudstyr og krypteringsmaskinen Enigma.
Selve luftkrigen er kort beskrevet i
Forord,
mere udførligt i afsnittene
Battle of Britain
og
Blitzen.
1. Om radar og dets betydning for
Luftkrigen over England
1940 - 41
Radar - oprindelig en amerikansk
betegnelse - er en forkortelse for
Radio Detection
and Ranging.
Det er et system til at opfange og analysere ekkoer fra
radiobølger.
I luftkrig anvendes radarsystemer bl.a. til at spore fly, der er udenfor synsfeltet -
enten på grund af afstand eller usigtbarhed. Radar er
baseret på den opdagelse, at genstande af metal, ex. fly og skibe,
giver et særlig kraftigt ekko, når de rammes af
radiobølger.
En opdagelse, der blev gjort allerede af fysikeren Hertz
i 1888, med først arbejdet videre på 1920' og 1930'erne i
flere lande. Tyskland var teknologisk set længst fremme med
radarteknikken i 1939, da Anden Verdenskrig brød ud.
Alt, hvad man behøver for at spore et fly i luften ved hjælp af
radiobølger, er derfor en
radiosender og en radiomodtager. En radarstation til sporing af
fly udsender en kontinuerlig serie af korte radiosignaler - radiopulser. Straks efter
udsendelsen af hver radiopuls aktiveres radarstationens modtager for at kunne
modtage eventuelle reflekterede radiobølger - ekkoer -
fra flyet, der
er blevet ramt af den udsendte radiopuls.
For at kunne
skelne ekkoet fra flyet mellem alle mulige ekkoer, indstilles
radarstationen til
kun at registrere reflekterede radiobølger -
ekkoer - med
samme frekvens (bølgelængde), som radiobølgerne i de radiopulser,
radarstationen
sendte ud.
Radarsystemer.
Ovennævnte
radarsystem er det mest elementære pulse radarsystem.
Siden 1930'erne er der foregået en kraftig udvikling
indenfor radarteknikken. Der findes i dag en række
forskellige systemer inden for to hovedgrupper: Pulse
radar og CW radar. Det sidstnævnte CW (continious wawes) bruges ex. i
forbindelse med hastighedsmålinger på basis af doppler
effekten. En populær gennemgang af de forskellige
systemer kan p.t. findes på adressen:
www.engineersgarage.com/articles/types-of-radars?page=1
De efterfølgende
beskrivelser er baseret på simple pulse radar systemer.
Retning.
For at kunne stadfæste den retning ekkoet kommer fra,
er det mest formålstjenligt, at radiopulsen udsendes i en
så smal stråle
- lyskegle - som muligt. Dette kan af praktiske årsager kun
lade sig gøre ved at benytte radiobølger med en meget
høj frekvens i radiopulsen. Jo højere radiofrekvens - eller kortere
bølgelængde -, des mere nøjagtigt kan man stadfæste
retningen af et ekko fra et reflekterende fly.
Afstand.
For at kunne stadfæste afstanden til det reflekterende
fly, måler radarstationens modtager den tid, der er gået
fra radiopulsen blev udsendt, til ekkoet kommer
tilbage til radarstationens modtager. Da radiopulsen og
ekkoet bevæger sig med lysets hastighed - 300.000 km i
sekundet - måles den tid i mikrosekunder.
Flyvehøjde.
For at drage fuld nytte af ekkoet
til luftforsvar skal man også kunne udlede oplysninger
om det reflekterende flys
flyvehøjde.
Det kræver, at
man kender afstanden til flyet. Ved at dreje
modtagerantennen i det vertikale plan kan man finde
vinklen mellem horisonten og flyet, og ved hjælp af
trigonometri udlede flyets flyvehøjde.
I praksis
krævede det i 1940 to forskellige radarstationer til at
arbejde sammen, hvis man ønskede en nøjagtig
højdeangivelse. En til at bestemme retning og afstand,
en anden til at finde vinklen mellem radarstationens
horisontalplan og ekkoet.
Chain Home
radarstationerne i 1940 kunne på grund af
modtageantennernes opbygning både give brugbare
informationer om det reflekterende flys flyvehøjde,
retning og afstand. Se punkt 1.3.
Den teknologi,
der skulle bruges til at udlede den slags oplysninger af
et ekko, fik i 1930'ernes England - betegnelsen RDF - Radio Direction
Finding. Chefen for Fighter Command - Dowding - kaldte
det Radio Location. Fra 1943 blev den amerikanske betegnelse radar -
Radio Detection and Ranging - indført.
I
flere lande eksperimenterede man med radar i 1920'erne
og 30'erne. Det er værd at påpege, at England
ikke var det første land, der udviklede radar (eller RDF)
systemer. Men
England blev det første land til at udnytte radar
effektivt til
forsvarsbrug under luftangreb, nemlig under Battle of Britain
i sommeren og efteråret 1940.
I tilknytning til
radarstationerne havde englænderne i 1940 fået opbygget
et meget effektivt varslings- og kommandosystem, der på
få minutter kunne udvirke, at fly blev sendt i luften
til at imødegå et angreb, som radarstationerne
registrerede som fjendtlige ekkoer.
Japanerne foretog et
massivt luftangreb på den amerikanske stillehavsflådes
hovedbase Pearl Harbor på Hawaii øerne i december 1941 - næsten 1½ år efter
at englænderne succesfyldt havde anvendt radar i Battle of Britain. De amerikanske
radaroperatører registrerede i god tid radarekkoerne fra den japanske
angrebsstyrke. Men den amerikanske flåde havde
i december 1941 desværre ikke
fået opbygget noget varslings- og kommandosystem i
tilknytning til deres radarsystem som det engelske
flyvevåbens i 1940. Englændernes system kunne hurtigt analysere, og
om nødvendigt iværksætte en effektiv reaktion på radarekkoer.
I tilfældet Pearl Harbor mente radaroperatørernes overordnede, at ekkoerne fra de japanske fly måtte stamme fra et antal
amerikanske fly, der var på vej mod Pearl Harbor på
samme tid. De amerikanske jagerfly, der var stationeret
ved Pearl Harbor, blev derfor ikke sendt i luften for at
imødegå japanernes angreb. Det lykkedes som bekendt
japanerne ved det ene angreb at ødelægge over halvdelen af
amerikanernes
stillehavsflåde.
1.1 Luftforsvar uden brug af radarsystemer
1.1.1
Dagangreb
Havde RAF's Fighter Command ikke haft sit effektive radarbaserede
varslingssystem - på engelsk et early warning system - i 1940, var Battle of Britain
ikke
blevet noget langvarigt luftslag. Det tyske Luftwaffe ville
med jager- og bombefly have nedkæmpet Fighter Command i
løbet af et par uger i juli / august 1940. Eller
alternativt have trængt Fighter Command ud af området
over Den Engelske
Kanal og Sydengland. I begge tilfælde ville Sydengland
have været forsvarsløst overfor massive tyske
præcisionsbombardementer i dagtimerne.
Den italienske
general Giulio Douchets ideer om det umulige i at stoppe bombeangreb,
ideer der er fremført i hans bog
"Command of the Air" , ville have
været en realitet. Se evt.
Forsvarsstrategien.
Et effektivt engelsk luftforsvar med jagerfly
uden deres radarbaserede varslingssystem ville kræve omfattende patruljering
med Fighter Commands jagerfly langs hele den engelske
syd- og østkyst.
Patruljeringen skulle endda oftest foretages i
to forskellige højder (over og under et evt. skylag). En
sådan effektiv patruljering ville have
krævet mange gange flere piloter og jagerfly, end
Fighter Command havde til rådighed i 1940. Jagerflyene kunne
kun være i luften maksimalt 1 time,
før de skulle returnere til deres base for at genoptanke.
Med det radarbaserede varslingssystem - kaldet "The
Dowding System" - kunne Fighter Commands jagerfly i
princippet nu blot vente på deres flyvestationer, indtil
de blev alarmeret og sendt i luften ved et tysk angreb.
Spring evt. til
pkt. 1.5 herunder.
1.1.2
Natangreb
Ved natangreb var hverken
det radarbaserede varslingssystem eller patruljering - omtalt under
dagangreb - tilstrækkeligt til at iværksætte effektive modangreb. Fighter Commands jagerfly kunne helt frem til foråret 1941 ikke
finde de angribende fly i mørket, selvom
varslingssystemet kunne lede jagerflyene hen i nærheden af dem.
Selv under de bedste
forhold kunne et jagerfly meget sjældent finde et bombefly i
mørket, hvis det var blot 300 m væk.
Skulle jagerfly kunne
finde angribende bombefly i mørket, var det
radarbaserede varslingssystem i 1940 ikke tilstrækkeligt.
At finde angribende tyske bombefly - især efter, at de havde passeret
den engelske kystlinie - ville i 1940 kræve yderligere to ting
(a) og (b):
(a) et specielt
jordbaseret radarsystem (GCI) til at lede jagerflyet hen i
nærheden af det angribende bombefly, og
(b) et letvægtsradarsystem
(AI) indbygget i jagerflyet til at lokalisere det
angribende bombefly, når jagerflyet var kommet i
nærheden af det angribende bombefly.
De to systemer
- henholdsvis GCI og AI - er beskrevet
nedenfor i pkt. 1.6 og 1.7.
De to radarsystemer - GCI
og AI - var
ikke færdigudviklede før maj 1941. De nødvendige elektroniske
komponenter til systemerne var endnu i 1940 stadig på eksperimentalstadiet,
som beskrevet nedenfor.
1.2 Udviklingen af radarsystemer
- Robert Watson-Watt
I flere lande, herunder bl.a. England, Japan, Tyskland
og USA arbejdedes der i 1930'erne med at udvikle
radarsystemer på eksperimental basis.
I England blev radar før 1943 kaldt RDF - Radio
Direction Finding. Ordet radar stammer fra USA, og det
var en forkortelse for
Radio Detection
and Ranging.
Tyskland var længst fremme med et meget simpelt - men
brugbart - radarsystem i 1934. I 1938 havde de et
radarsystem - "Freya", der kunne fungere som
varslingssystem over hav, og som var i stand til at
stadfæste et fly på op til 90 kilometers afstand. I 1939 havde
tyskerne et brugbart radarsigte system - "Würzburg A"
- med en
rækkevidde på 30 km til at dirigere såvel antiluftskytskanoner
som jagerfly.
England kom først ud over det rent eksperimentale stadium i
januar 1935. En ingeniør Robert Watson-Watt blev sat til
at lede
udviklingen af et radarsystem, der kunne fungere som
varslingssystem for England. Robert Watson-Watt var Superintendent of
the Radio Department of the National Physical Laboratory.
I december 1935 var udviklingen i England kommet så vidt,
at man havde besluttet at bygge fire radarstationer
omkring London. De fire stationer blev led i det, der senere kom til at hedde Chain Home systemet.
Radarstationerne var opbygget på basis af de i England kendte
tekniker og komponenter. Problemerne med udviklingen af radarsystemer fra 1930'erne og helt frem til omkring 1950
bestod især i udvikling af elektroniske komponenter, der
kunne arbejde med meget høje frekvenser. Især
udvikling af en komponent - et senderrør -, der i meget
korte impulser kunne yde den effekt, der var påkrævet for at få et brugbart ekko
fra fly på lang afstand, var meget vigtig.
Kravene til senderrøret var:
-
Meget kraftig effekt - over 100 kw i
impulserne -
for at skaffe tilpas kraftige ekkoer. Forskellen
mellem effekten i det modtagne ekko fra et fly
og impulseffekten fra antennen var typisk fra 10-6 til
10-12, og
-
en tilstrækkelig høj sendefrekvens i
impulserne - over 20 Mhz (15 m) -
jo højere frekvens jo mere sikker
refleksion fra et fly, og jo højere frekvens jo
kortere antenner og bedre muligheder for
retningsbestemmelse.
Der ud over var kravene til et
radarsystem:
-
en modtagerantenne, der kunne bruges
til at afsløre
den retning ekkoer blev modtaget fra,
-
et modtagersystem, der kunne modtage
og og forstærke de meget svage ekko signaler,
-
et elektronisk system, der kunne
udelukke ekkoer fra de faste genstande på jorden,
-
et elektronisk system, der kunne
skelne ekkoer fra fjendtlige fly fra ekkoer fra egne
fly (
IFF),
-
et billedrør - en skærm -, der kunne vise
ekkoerne og illustrere den tid, der var gået, siden sende
impulserne var afsendt (basis for afstandsmåling).
Parallelt hermed kom udvikling af et
radarsystem, der kunne bestemme den højde over
jordoverfladen et radarekko kom fra, når man havde den
retning, ekkoet kom fra.
Den teknologiske udvikling af de
nødvendige komponenter skred hurtigt frem, og udviklerne
havde praktisk taget frie hænder rent
budgetmæssigt.
I 1938 var de første
radarstationer i Chain Home systemet operationsklare, og
systemet med varsling var blevet afprøvet med succes.
Kravet til højdebestemmelse af ekkoerne var indbygget i
systemet. Det blev besluttet at opbygge hele Chain Home systemet
på basis af det tekniske stade, det havde i 1938, og
ikke afvente yderligere udvikling i teknologien.
Radarstationer i Chain Home kæden var
puls radar systemer, og de fik
typebetegnelsen AMES-1, som står for Air Ministry
Experimental Station.
Tyskland var udviklingsmæssigt et par
skridt længere fremme end England i 1938. En
sammenligning mellem det engelske AMES-1 radarsystem
brugt ved Chain Home radarstationerne, og
det tyske
Freya system i 1938: v = variabel
|
System
(tal for 1938) |
Sende-frekvens
i Mhz |
Bølge-længde
i meter |
Sende-effekt
i kw |
Pulser
pr. sek. |
Puls-
længde i sek. x 10-6 |
|
AMES-1 |
22
v |
13,5
v |
350 |
25 v |
6 - 25 |
|
Freya |
120 |
2,5 |
15 |
500 |
3
|
|
Begge
systemer var puls radarsystemer med en maksimal praktisk rækkevidde
på
ca. 160 km i 1938. AMES-1 brugte adskilte
sende- og modtager antenner, og var på grund
af antennernes dimensioner et
stationært system med faste
antenneopstillinger. Freya havde fælles
sende- og modtageantenne, et duplex system
til at adskille sending og modtagning, og var drejeligt og mobilt. |
Forholdet mellem radiobølgers frekvens målt i Mhz
(hz x 106) og bølgelængde målt i m er:
300 / (Mhz) Bølgelængden er en praktisk
måleenhed, da den giver et indtryk af
antennens (dipolens) dimensioner, der står i forhold
til eller er den samme som
bølgelængden. En mere detaljeret
beskrivelse af teknikken bag pulse radar systemer til
brug for varslingssystemer findes på hjemmesiden
www.radartutorial.eu. En
sammenligning mellem engelske og tyske radarsystemer i
1940 findes i bogen Alfred Price: "Instruments of
Darkness" i udgaven fra 200539
kapitel 2,
"The Instruments". I 1938 blev ansvaret for
videreudviklingen af radar i England overdraget til A.
P. Rowe, en af Robert Watson-Watt's medarbejdere, og
det blev organiseret i TRE Telecommunications Research
Establishment. Historien om udviklingen af radar
i England er detaljeret beskrevet i Robert
Watson-Watt's bog "Three Steps to Victory" fra 195758. En
anden af udviklingsopgaverne inden for radarteknikken var at konstruere et
simpelt radarsystem, der kunne installeres i et
jagerfly, så piloten kunne spore andre fly i mørket.
Hovedproblemerne for et sådant system var to ting, dels
vægten, det måtte helst ikke veje mere end 90 kg, og
dels antennen, der skulle være under en meter. Dvs.
sendefrekvensen skulle være over 500 Mhz (dvs.
bølgelængder i centimeterområdet) og dermed en
sendefrekvens, der var 20 gange højere end AMES-1
systemerne.
Arbejdet på dette system startede
i 1936, men først i sommeren 1941 havde man udviklet et brugbart
system. Det blev kaldt Airborne Interception
- AI -
radarsystemet, se punkt 1.7. Systemet blev
ikke brugbart tids nok
til at spille nogen afgørende rolle i Slaget om England,
hverken den første del eller Blitzen.
En tredje opgave var udvikling af et jordbaseret
radarsystem, så Fighter Command - i mørket inde over
det engelske landområde - kunne styre sine jagerfly hen i nærheden af de
angribende bombefly, se punkt 1.6 GCI - Ground Controlled Interception radarsystemet.
Heller ikke dette
system blev klar til nogen af faserne i Slaget om
England.
1.3 CH - Chain
Home radarsystemet
I 1935 var det blevet besluttet så hurtigt som muligt at
opbygge et radarbaseret varslingssystem for flyangreb fra syd og øst mod England. Systemet
- et puls radar system - skulle
baseres på et
antal radarstationer langs Englands syd- og østkyst.
Systemet skulle kunne registrere fjendtlige fly så
betids,
at Fighter Command kunne nå at sende jagerfly op
for at møde dem før eller samtidig med, at de kom ind over land. Systemet af radarstationer blev kaldt Chain Home.
I 1938 havde
the Radio Department of the National Physical Laboratory
ledet af Robert Watson-Watt udviklet en prototype på et
radarsystem AMES-1 (Air Ministry Experimental Station). Systemet opfyldte de simple
krav, der var stillet.
På grund af den spændte
situation i Europa i 1938, blev det besluttet at opbygge hele Chain Home systemet med AMES-1 radarstationer,
uden at afvente yderligere tekniske fremskridt.
I juli
1940 var systemet i forhold til udviklingen forældet, men det var til gengæld
færdigudbygget, og
betjeningen af det og det tilhørende varslings- og
kommandosystem var indøvet til nærmest
perfektionisme.
Fighter Command brugte de sporadiske tyske luftangreb i
juli 1940 til at optimere systemet, så da de massive
flyangreb satte ind i august, var systemet så effektivt,
det efter omstændighederne kunne blive.
Det bestod af 20 AMES-1 radarstationer,
der var spredt langs Englands syd- og østkyst. En AMES-1 radarstation havde i 1940 i praksis en
rækkevidde på 180 - 200 km.
Sendefrekvensen i radiopulserne for en AMES-1 radarstation var i
området 22 - 30 Mhz (13, 5 - 10 m). Sendeeffekten var
oprindelig på 350 kw, men stationerne blev efterhånden
udbygget til at have en sendeeffekt på 750 kw.
Sendeantennerne var ophængt som
vandrette dipoler mellem to 107 m høje ståltårne. Ved at
have tre eller fire ståltårne på linje gav det mulighed
for at have to eller tre sæt dipoler. Flertallet af
radarstationerne havde tre ståltårne på linje og to sæt
dipoler udspændt mellem tårnene.
For at dække så stort et luftområde så effektivt som
muligt sendte hver Chain Home radarstation sine signaler
som en stationær "lyskegle" med en horisontal vinkel på 1000.
Stationernes "lyskegler" overlappede derved hinanden
langs kysten.
Anlægget var i sin natur helt stationært, og antennerne kunne
ikke drejes. For at kunne udelukke nabostationernes
ekkoer ved modtagelsen, sendte
radarstationerne på forskellige frekvenser i området
omkring 22 Mhz.
Modtagerantennerne på hver station var monteret på fire
76 m høje antennetårne af træ (for at undgå
refleksioner). Det var selve monteringen af
modtagerantennerne (to sæt vinkelret på hinanden), der gjorde det muligt for radaroperatøren
at stadfæste ekkogiverens position i det horisontale
plan og dets højden over jorden. Stationens
radarmodtager kunne kun modtage ekkosignaler på samme
frekvens som radarstationen sendte med, dvs. dens "egne"
ekkosignaler. Modtageren blev derfor
ikke forstyrret af naboradarstationers ekkosignaler, der
blev udsendt med en lidt højere eller lavere frekvens.
For at kunne kompensere for (a) de
uhensigtsmæssigheder, den lave sendefrekvens medførte, og for
(b) at undgå forstyrrelser fra nabo radarstationer, kunne
radaroperatøren skifte mellem to eller tre forskellige sendefrekvenser, antal impulser pr. sekund og
impulslængden. Operatøren kunne også ændre
senderens "lyskegle" til et lavere
niveau ved at skifte til
et andet sæt sendedipoler.
På grund af antenneforholdene kunne stationerne ikke spore meget lavtgående
fly. Til at rode bod på dette, blev der opbygget et Chain Home Low system, som er beskrevet i næste punkt
1.4.
Chain Home kunne som følge af antennekonstruktionen
heller ikke
spore fly, når de først var kommet ind over land og ind
bag ved stationen. Det
var i sommeren og efteråret 1940 en opgave for
observatørkorpset - se punkt 1.5 og / eller
Forsvarsstrategien.
Sammen med Chain Home Low systemet, se punkt 1.4,
og det såkaldte Filter Room, se punkt 1.5, fungerede Chain Home systemet effektivt under Battle of Britain
- til
trods for sine svagheder og unøjagtigheder.
Systemet
kunne - sammen med Chain Home Low og Filter Room - give oplysninger -
varsling - om
fjendtlige fly på vej mod Englands kystlinje - så som:
-
flyenes position plus / minus nogle kilometer,
-
en ide om flyvehøjden,
-
flyenes hastighed og
-
flyveretning,
-
og om der var tale om mange eller få fly i
en samlet gruppe.
Så snart de fjendtlige fly havde
passeret kystlinjen, kunne systemet som nævnt ikke længere
registrere dem.
Nøjagtigheden
af de oplysninger, der kunne gives, var helt afhængig af radaroperatørens
fortolkning af det radarekko, hun så på radarstationens
billedrør. Praktisk taget alle
radaroperatørerne var kvinder. Kvinder viste sig generelt bedre
til at give en nøgtern fortolkning af, hvad de så på
billedrøret, og betjene modtagerens vinkelmåleudstyr for
at finde modtageretningen for ekkoet. Der ud over kunne
operatøren styre senderens variable parametre for
at få billedrøret til at give mere nøjagtige oplysninger
om et ekko.
Radaroperatøren rapporterede sine observationer via en
direkte telefonledning til Fighter Commands Filter Room.
Se punkt 1.5 og / eller
Forsvarsstrategien.
Efter juli 1940 blev der opført yderligere ni AMES-1
radarstationer i Chain Home systemet, der nu også blev
udvidet til det vestlige England.
Enkelte
Chain Home radarstationer fungerede indtil midten af
1950'erne, selv om der på det tidspunkt var langt
mere effektive systemer til rådighed.
I 1944 - 45 blev Chain Home systemet benyttet som
sporingssystem for start af de tyske V2 ballistiske
missiler, der
blev afsendt
mod England. Til trods for radarstationernes forældede teknik, kunne systemet
tydeligt spore selve
opsendelsen af missilerne.
Arbejdede flere Chain Home
radarstationer sammen ved en V2 missilopsendelse, kunne
de i forening beregne missilets
nedslagsområde, og der kunne blive slået luftalarm
for nedslagsområdet. Samme stationer kunne i
forening også nøjagtigt fastslå missilets startsted,
som
dermed blev et mål for RAF Bomber Command Tactical
Group.
Vedrørende en speciel tilføjelse til Chain Home
systemets varslingsfunktion se punkt 1.8.2.
Trods de meget høje markante sende- og modtageantenner
på Chain Home radarstationerne langs kysterne, blev det
tyske Luftwaffe, først efter at Battle of Britain
var startet, klar over at englænderne havde et "early
warning" system. I første omgang havde tyskerne ikke
anset de meget høje antenner for at være en del af et
radarsystem. Årsagen var, at tyskerne ikke anså de
radarsendefrekvenser, Chain Home systemet arbejdede med
(omkring 22 Mhz), for at være brugbare radarfrekvenser.
Tyskerne brugte selv 120 Mhz i deres radarstationer.
1.4 CHL -
Chain Home Low radarsystemet
Ved intensiv afprøvning af Chain Home systemet i 1938
viste det sig, at det var meget vanskelligt at få ekkoer
fra fly, der befandt sig i luftrummet mellem
jordoverfladen og 20 over
horisonten. Dvs. at meget lavtgående fly kunne nærme
sig Englands kyster uden at blive opdaget af det
radarbaserede varslingssystem baseret på Chain Home
radarstationerne. Situationen for de lavtgående fly var
det, der i dag populært
kaldes at være "under radaren".
Siden 1936 havde det
engelske ministerium for hæren - War Office - haft ingeniører i
gang med at udvikle et radarsigtesystem til brug for
kystforsvarets - Coastal Commands - artilleri. Da et
sådant system kræver en meget koncentreret "lyskegle", i såvel det
vandrette som det lodrette plan, var det nødvendigt at
arbejde med meget højere frekvenser dvs. kortere bølgelængder
end Chain Home systemet. Den højeste sendefrekvens, man
kunne håndtere i 1938, var 200 Mhz svarende til en
bølgelængde på 1,5 m mod Chain Home's 22 - 30 Mhz
svarende til 13, 5 - 10 m
bølgelængde.
Ved at bygge en antenne
med 32 dipoler i en lang række lykkedes det at få en meget smal
"lyskegle" både vandret og lodret. På grund af
den lavere bølgelængde med deraf kortere dipoler kunne antennen uden
problemer konstrueres sådan, at den kunne drejes såvel i
det vandrette som i det lodrette plan. Systemet kunne
således også bruges til at bestemme flyvehøjden på fly
som Chain Home systemet havde lokaliseret.
I 1938 var et sådant
system færdigudviklet - England var ved at indhente
Tysklands forspring. Systemet kunne opfange ekko fra et
lavtgående fly i op 50 km's til afstand. Retningen til
flyet var simpelthen den retning antennen pegede i.
Ulempen i forhold til AMES-1 var, at radaroperatøren
i 1940 selv skulle dreje antennen (ved hjælp af pedaler) hele tiden for at afsøge
horisonten for lavtgående fly.
På Robert Watson-Watts
anbefaling købte Air Ministry et sådant radarsystem til
hver af de 20 AMES-1 radarstationer. Det blev kaldt
Chain Home Low, og fik hos flyvevåbnet betegnelsen
AMES-2. Systemerne var
færdiginstalleret i løbet af 1939.
Systemets data er vist her
med det tyske system Freya til sammenligning:
|
System
|
Sende-frekvens
i Mhz |
Bølge-længde
i meter |
Sende-effekt
i kw |
Pulser
pr. sek. |
Puls-
længde i sek. x 10-6 |
|
AMES-2 |
200 |
1,5 |
150 |
400 |
3 |
|
Freya |
120 |
2,5 |
15 |
500 |
3
|
|
For
AMES-2: Under Battle of
Britain blev systemernes antenner stadig drejet manuelt. |
Noter
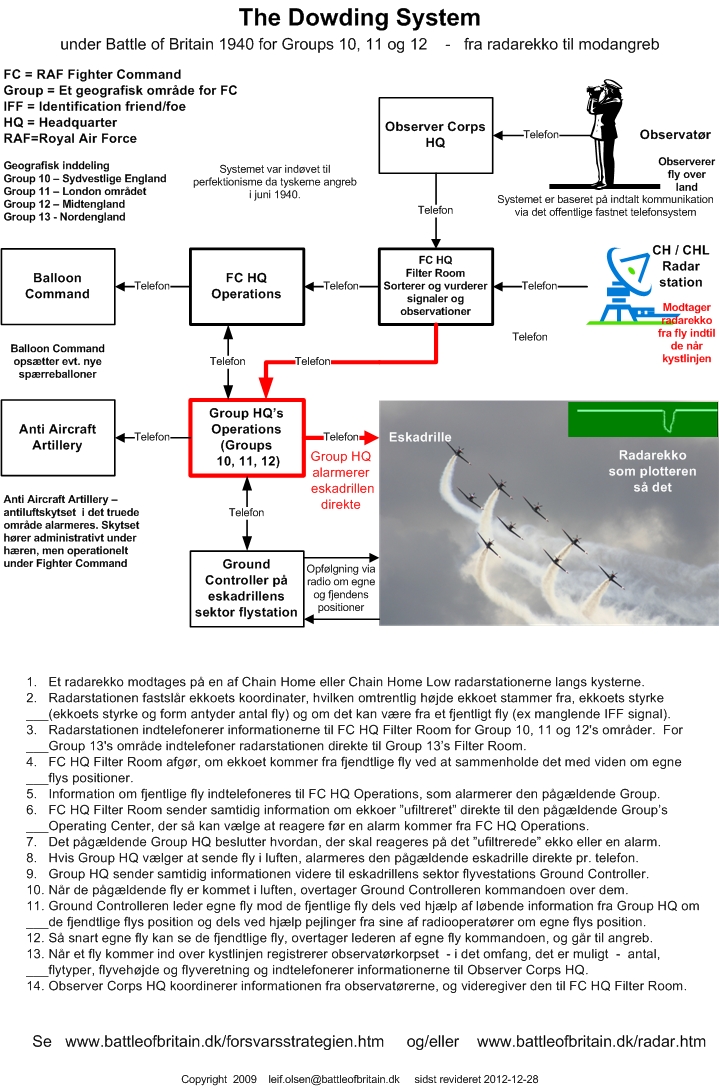
1.5
Filter Room
På illustrationen herunder illustreres og beskrives Filter Room
funktionen under Battle of Britain: (Illustrationen som
.pdf fil:
varsling)
|
|
Indeks |
|
for
samtlige 26 afsnit herunder |
|
klik på det ønskede
afsnit |
Startside
Forord
Oversigt
Forhistorien
Frankrigs fald
Dunkerque
Forsvarsstrategien
Seelöwe
Sea Lion
Battle of Britain
Blitzen
Kontrafaktisk
Efterspillet
Offensiven 1941
Ledere
England
Ledere
Tyskland
Flytyperne
Radar - Enigma
RAF's
historie
Luftwaffe
Krigsspil
Kronologi
-
Tavle 1
Kronologi
- Tavle
2
Billedliste
Henvisninger
Ordliste
leksikon
Noter
- Kilder
Litteraturliste
Kommentarer
Korrektioner
Blogs
Noter
|
Indeks |
|
for
samtlige 26 afsnit herunder |
|
klik på det ønskede
afsnit |
Startside
Forord
Oversigt
Forhistorien
Frankrigs fald
Dunkerque
Forsvarsstrategien
Seelöwe
Sea Lion
Battle of Britain
Blitzen
Kontrafaktisk
Efterspillet
Offensiven 1941
Ledere
England
Ledere
Tyskland
Flytyperne
Radar - Enigma
RAF's
historie
Luftwaffe
Krigsspil
Kronologi
-
Tavle 1
Kronologi
- Tavle
2
Billedliste
Henvisninger
Ordliste
leksikon
Noter
- Kilder
Litteraturliste
Kommentarer
Korrektioner
Blogs
Noter
Noter
|
Indeks |
|
for
samtlige 26 afsnit herunder |
|
klik på det ønskede
afsnit |
Startside
Forord
Oversigt
Forhistorien
Frankrigs fald
Dunkerque
Forsvarsstrategien
Seelöwe
Sea Lion
Battle of Britain
Blitzen
Kontrafaktisk
Efterspillet
Offensiven 1941
Ledere
England
Ledere
Tyskland
Flytyperne
Radar - Enigma
RAF's
historie
Luftwaffe
Krigsspil
Kronologi
-
Tavle 1
Kronologi
- Tavle
2
Billedliste
Henvisninger
Ordliste
leksikon
Noter
- Kilder
Litteraturliste
Kommentarer
Korrektioner
Blogs
|
Se "The Dowding System som .pdf fil
varsling
1.6
GCI - Ground Controlled Interception radarsystemet
Under Battle of Britain var varslingssystemet - baseret
på Chain Home, Chain Home Low radarstationer og Filter Room - det
eneste radarbaserede system, det var til rådighed for
at få informationer om angribende fly på vej mod
England. Systemet kunne kun
registrere angribende fly indtil de nåede kystlinjen.Efter
at Group Headquarters havde sendt en eskadrille af sted mod angribende
fly,
overtog eskadrillens Sector Ground Controller på eskadrillens
flyvestation kommandoen over
eskadrillen, og skulle lede eskadrillen frem mod de
angribende fly, indtil den havde fået øjenkontakt med
fjenden.
Kvaliteten af de informationer, Filter
Room kunne levere, var normalt sådan,
at en Sector Ground Controller kunne lede
sine eskadriller af jagerfly frem, så de ville møde de
angribende fly indenfor et område med en radius på
omkring fem kilometer.
Når en eskadrille havde
øjenkontakt med de angribende fly, overtog lederen af
eskadrillen fra sit fly kommandoen over eskadrillen.
Når de angribende fly var kommet ind
over land, mistede Chain Home systemet kontakten med
dem, og det var helt op til observatørkorpset - Observer
Corps - fra tusindvis af observationsposter at skaffe oplysninger om de fjendtlige flys
bevægelser. Først efter Battle of Britain var overstået
begyndte de nyoprettede GCI radarstationer at overtage
denne funktion. Chain Home systemet fungerede
godt under dagangrebene i Battle of Britain. En eskadrille, der
var sendt op til modangreb, kunne om dagen normalt se de
angribende fly på op til fem kilometers afstand oftest samtidig med eller lige efter at de
angribende havde passeret kystlinjen.
Systemet var ikke effektivt i mørke,
fordi de eskadriller, der eventuelt var sendt op, ikke
kunne finde fjenden i mørke, selv om de kun var få
hundrede meter fra dem. Systemet var, som nævnt, heller ikke
effektivt, når fjenden først var kommet ind over
kystlinjen.
Mens Battle of Britain blev udkæmpet,
blev der gjort forsøg med at lade en AMES-2 radarstation
følge et fly inde over land, og fra selve radarstationen
styre et andet fly til at opsøge det. Det blev hurtigt
en succes, og det var starten på et GCI
- Ground Controlled Interception
- system.
(I modsætning til
AMES-1 kunne AMES-2 - på grund af den lavere
bølgelængde med deraf kortere dipoler på radarstationernes antenne
- uden
problemer konstrueres sådan, at den kunne drejes såvel i
det vandrette som i det lodrette plan.)
GCI systemet blev
konstrueret som et radarsystem med
en kontinuerligt roterende antenne, og et tilhørende cirkelrundt billedrør
til at vise ekkoerne.
Billedrøret var opbygget sådan, at centrum skulle illustrere antennens position. En lysende linje fra centrum på billedrøret ud til
periferien viste den retning antennen udsendte signaler i og modtog
ekkoer fra. Positionen af et "blip" på linjen markerede afstanden til det ekkogivende
fly. Synkront med, at antennen drejede hele horisonten
rundt, drejede den lysende linje på PPI billedrøret hele cirklen rundt
og viste ekkoer hele horisonten rundt. Et sådant billedrør blev kaldt en Plan Position Indicator (PPI)
eller en vektor radarskærm.
Hele GCI systemet blev færdigudviklet på et
par måneder, efter de første forsøg med en roterende
antenne og et PPI billedrør var gennemført. Den første egentlige GCI radarstation kunne tages
i brug i januar 1941 - altså efter Battle of Britain var
blevet udkæmpet, men mens Blitzen stadig rasede. Først i
maj 1941 - samtidig med Luftwaffe indstillede sine
natlige bombardementer - var hele det sydlige England
dækket effektivt af seks GCI - radarstationer.
På basis af "blippene" på en GCI-radarstations PPI billedrør kunne en
Sector Ground Controller nu direkte lede sine eskadriller mod fjenden
ved hjælp af radiokommunikation til flyene.
Når flyene var indenfor få kilometer fra de fjendtlige
fly, måtte de stadigvæk selv finde de fjendtlige fly ved visuel kontakt.
Men Sector Ground Controlleren var nu uafhængig af, at plottere ved hjælp af
radiomodtagere skulle pejle sig frem til eskadrillens position. Se evt.
Forsvarsstrategien
pkt. 4.4 Fighter Command. For at systemet skulle kunne bruges til kamp i mørke, var det nødvendigt, at
de pågældende jagerfly var
udstyret med et lille radarsystem - et såkaldt
AI - Airborne Interception
radarsystem - til at finde de fjendtlige fly
i mørket indenfor de sidste et par kilometer.
De første GCI
radarstationer havde betegnelsen Type 7. Data for Type
7 med det tyske system Freya til sammenligning:
|
System
|
Sende-frekvens
i Mhz |
Bølge-længde
i meter |
Sende-effekt
i kw |
Pulser
pr. sek. |
Puls-
længde i sek. x 10-6 |
|
Type 7 |
200 |
1,5 |
80 - 100 |
300 - 500 |
3 - 8 |
|
Freya |
120 |
2,5 |
15 |
500 |
3
|
|
For
Type 7: Antennen kunne drejes og rotere i
begge retninger med hastigheder fra 0,5 til
8 omdrejninger i minuttet. Den praktiske
rækkevidde var mellem 80 og 150 km. Under 80
km fra antennen kunne systemet kun
registrere lavtgående fly. Det var derfor
nødvendigt at stationernes rækkevidder
overlappede hinanden for at dække for både
højt- og lavtflyvende fly. |
1.7 AI - Airborne Interception
radarsystemer
Da radar i 1936 var blevet introduceret til Fighter
Command som et jordbaseret varslingssystem ved
flyangreb, var det åbenlyst, at man kun kunne drage
nytte af systemet i dagtimerne.
Det radarbaserede varslingssystem kunne sammen med
assistance fra Sector Ground Controllers kun hjælpe
jagerfly til at komme ind på en afstand af nogle få
kilometer fra de fjendtlige fly.
Det var tilstrækkeligt for de jagerfly, der blev
sendt op til modangreb i dagslys. Jagerflyenes piloter
kunne indenfor den afstand se de angribende fly, og
gå til modangreb. Men i mørke ville jagerflyenes piloter ikke kunne se de
angribende fly, med mindre afstanden til dem var under
300 m.
For at piloten med rimelig sikkerhed skulle
kunne finde angribende fly i mørket, ville det kræve, at
hans fly
var udstyret med et let radarsystem, der kunne spore fly
inden for en afstand på mellem 150 m og 10 km.
Kravene til et sådant AI - Airborne Interception - system var, at
-
det havde en minimum rækkevidde på
150 m,
-
det havde en maksimum rækkevidde på
10 km,
-
det ikke i lav højde blev forstyrret
af radarekkoer fra jorden,
-
det skulle kunne betjenes af en
mand,
-
det ikke vejede over 90 kg,
-
at antennerne ikke var over 1 m, og
-
at dets volumen kunne passes ind i
et tosædet (nat)jagerfly.
For at leve op til disse krav, viste det
sig nødvendigt, at systemets sendefrekvens skulle være
over 1000 Mhz svarende til 30 cm bølgelængde. De
nødvendige komponenter til at arbejde i centimeterbåndet
var først under udvikling i 1940, og en
helt tilfredsstillende løsning på Airborne Interception
problemet blev først klar i 1942.
Fra 1936 til 1939 havde Telecommunications Research
Establishment arbejdet på at udvikle et AI-system med
den kendte teknologi med sendefrekvenser på 200 Mhz. Det
første system viste sig udmærket til at vise skibe på
havet, men ikke fly i luften. Det gav anledning til
videreudvikling af et ASV - Air to Surface Vessel -
system parallelt med et AI system.
Det lykkedes i 1939 at få udviklet et AI system, -AI
MkIII -, til at spore fly i luften. Det havde en minimum rækkevidde på 330 m og en
maksimum rækkevidde på 2, 7 km. Systemet kunne være til
hjælp, men det var generelt set ikke særligt brugbart,
især på grund minimum rækkevidden. (På 300 m afstand
kunne piloten ikke se et fjentligt fly i mørket.)
I december 1939 fik den private
organisation EMI overdraget at videreudvikle AI MkIII,
så systemet bedre opfyldte de ovennævnte krav. Det
lykkedes for EMI at videreudvikle systemet, så det fik
en minimum rækkevidde på 130 m, systemet fik betegnelsen AI MkIV, og det var klart i december 1940.
I løbet af vinteren fik Fighter Command
opbygget nogle eskadriller med det nye system
installeret på den nyudviklede natjager af typen Bristol
Beaufighter. Se evt.
Flytyperne. Styrken kom først til at fungere effektivt
i maj 1941, og kom derfor ikke til at spille nogen
afgørende rolle under Blitzen.
Den 20. november 1940 lykkedes det for første gang for
en endnu ikke færdigudviklet Beaufighter natjager udstyret med med et
endnu ikke færdigudviklet AI MkIV radarset at opspore et tysk Ju 88 bombefly
på vej mod Birmingham og skyde det ned. Men der var
- som tidligere nævnt - først i maj 1941, at systemet med natjagere - udstyret
med radar og styret frem mod målområdet fra et
kommandocenter på jorden - kom i operationel tjeneste.
1.8 GL - Gun Laying radarsystemer
1.8.1
Anti-Aircraft Command
I 1940 - 41 bestod
Anti-Aircraft Commands jordbaserede antiluftskyts bestod af:
-
a) maskinkanoner til at
beskyde lavtgående fly - der sædvanligvis er under et
direkte angreb på fx. en flyvestation.
Skytten sigter direkte mod det angribende
fly, og håber at ramme det med maskinkanonens
projektiler, eller
-
b) egentlige antiluftskytskanoner,
der skyder mod højtgående fly - sædvanligvis
bombefly på vej til eller fra deres bombemål. Her er
opgaven at frembringe en voldsom granateksplosion,
hvis splinter eller trykbølge beskadiger
bombeflyene.
Skal en granat fra en kanon blot have en
lille chance for at skade de bombefly, den er tiltænkt,
er det nødvendigt at kende flyvehøjden. Kender man
flyvehøjden, kan det antal sekunder, der går efter
afskydningen, til granaten når flyvehøjden, beregnes og
indstilles på granaten, før den afskydes. Dvs. at
praktisk taget enhver antiluftskytskanon eller batteri
af kanoner kræver sit eget
system til at bestemme flyvehøjden for det mål, den
sigter imod.
Siden 1936 havde det
engelske ministerium for hæren - War Office - haft
et radarstyret sigtesystem (korrektør) under udvikling til brug for
antiluftskytset. Ideen med sigtesystemet var, at det
skulle angive både retning og højde for indstilling af
antiluftskyts og lyskastere mod et udvalgt mål.
I 1939 havde hæren et system - GL Mark 2 - til
rådighed. Systemets sendefrekvens var omkring 80 Mhz
svarende til en bølgelængde på ca. 3,5 m.
Systemet var i stand til at
lokalisere og måle måle afstanden til et fly, når systemets antenne blev rettet imod
det. I 1940 var systemet ikke i stand til selv at spore et fly, og angive retningen til det.
Afstanden til flyet kunne angives indenfor +/- 300 m, og
tidsindstillingen for granaterne kunne sættes
derefter.
Systemet var en hjælp for antiluftskytset, især i mørke
og overskyet vejr. Men det gav kun
en lille forbedring i den meget dårlige
træfsikkerhed for antiluftskytskanoner under Blitzen.
Først i 1943 var der GL- systemer til rådighed, der
selvstændigt kunne spore et fly indenfor et snævert
område og angive såvel retning som flyvehøjde til brug
for indstilling af kanonerne.
1.8.2
GL
- Gun Laying radar som varslingsradar
Afstanden mellem
Calais området i Frankrig og Dover området i England er
ca. 40 km, dvs. ca. 5 minutters flyvetid for en Me 110 jagerbomber ved havoverfladen. Det
giver ikke mange minutter for et varslingssystem
til at reagere i, hvis jagerbomberen starter alene nær
Kanalkysten, flyver direkte ud over Den Engelske Kanal i
meget lav højde mod England.
På toppen af
Dover klippen blev der derfor installeret to GL Mark 2
radarsystemer med antennerne permanent rettet mod Calais
området. Systemerne kunne registrere, når der
startede et fly fra Luftwaffes flyvestationer lige uden
for Calais.
En radaroperatør
kunne ved manuelt at styre antennen følge flyet. Havde flyet retning mod
England, kunne han via en direkte telefonledning til
Group 11's Operation Room rapportere
observationen.
Group 11's
Operation Room fik på den måde et varslingssignal
ca. 5 minutter før, de fik det tilsvarende
varslingssignal for det samme fly via Chain Home/Chain Home Low
og Filter Room systemet157.
Om Fighter Command kunne
nå at reagere inden flyet nåede et mål nær kysten afhang
alene af, om der var jagerfly i luften i det pågældende
område, når flyet blev observeret. Til gengæld var det
stærkt begrænset, hvilken skade et enkelt jagerbombefly
kunne udrette i det engelske kystområde.
Liste over
kildehenvisninger
til radars betydning for Slaget om England
Radar litt.
liste 01.pdf.
2. IFF - Identification Friend or Foe
IFF er et system, der benyttes til at identificere om
et fly reagerer på et givet radiosignal. Reaktionen fra flyet sker ved
hjælp af
en såkaldt transponder, der modtager radiosignalet, og som reaktion
automatisk returnerer et andet radiosignal, som den oprindelige afsender kan bruge til
at identificere flyet med.
I 1940 blev IFF systemer for første gang brugt i forbindelse
med radarsystemer for at kunne skelne mellem fly fra egne rækker og
fjendtlige fly. Samtidigt med udsendelsen af et radarsignal til at spore
fly, sendes i samme retning et IFF signal. Et eventuelt korrekt
svarsignal fra en IFF transponder samtidig med et radarekko fortæller
radaroperatøren, at der er tale om et radarekko fra et fly fra egne
rækker.
Et manglende IFF- svarsignal ved et radarekko betyder, at der
ikke er nogen aktiv transponder i det pågældende fly, der kan sende det
korrekt kodede svarsignal. Det siger ikke noget entydigt om, at radarekkoet
kommer fra et fjendtligt fly.
3. Om Fighter
Commands radio- og pejlesystemer HF - VHF
3.1 Radio- og pejlesystemet for jagerfly
Hvert jagerfly i RAF Fighter Command var udstyret med en radio sender /
modtager (transmitter / receiver forkortet til t / r udstyr). Udstyret
tjente to formål:
|
a) piloten kunne kommunikere med eskadrillechefen, de
øvrige piloter og eskadrillens Ground Controller, |
|
b) eskadrillens sektor flyvestation kunne pejle sig frem
til, hvor flyet befandt sig. (Det, der i dag har udviklet
sig til GPS.) |
Hver sektor flyvestation havde tre pejlestationer, der
var i stand til at bestemme retningen, hvorfra flyets radiosignaler kom.
Den position på et kort , hvor de afsatte pejleretninger krydsede
hinanden, var flyets position.
Hvis piloten ikke brugte sit t / r
udstyr til radiokommunikation, afsendte udstyret automatisk et pejlesignal af nogle sekunders
varighed hvert minut. Signalet blev opfanget af pejlestationerne, der så brugte
det til positionsbestemmelse. Dette
blev kaldt HF / DF systemet. (High Frequency Direction Finder).
Fire fly i en eskadrille kunne sende på samme frekvens,
idet både fly og pejlestationerne var indstillet på at sende / modtage pejlesignalerne i den
tid indenfor et minut, hvert fly sendte signaler. Signalerne fik navnet
"Pip-Squeak".
Ground Controller på eskadrillens sektor flyvestation
vidste således ved hjælp af
HF / DF systemet
til enhver tid, hvor en eskadrille befandt sig, uden at piloterne
behøvede at melde deres position tilbage.
Fra Group HQ Operations vidste Ground Controller'en,
hvor de angribende fly befandt sig. Ground Controller'en kunne så give
eskadrillen oplysninger om, hvilken kurs, de skulle rette ind efter for
at møde de angribende fly - Fighter Direction Control.
Pejlesystemet var således lige så vigtigt som radarsystemet til at få
etableret et modangreb. Se punkt
1.5
Filter Room.
3.2 HF / VHF
Radiopejlesystemet var blevet udviklet parallelt med
radarsystemet fra midten af 1930'erne til det var fuldt operationsklart
sammen med radarsystemet i foråret 1940.
Systemet opererede på frekvenser i HF området (frekvens
3 - 30 Mhz - bølgelængde 100 - 10 m). I slutningen af 1930'erne blev denne båndbredde mere og
mere udnyttet, så fejl og afbrydelser blev mere og mere hyppige. Hertil
kom atmosfæriske forstyrrelser og begrænset rækkevidde på denne
båndbredde. Ex. Ground Controller'e på sektor
flyvestationerne i Sydengland kunne ikke komme i
radiokontakt med de jagerfly, der dækkede den engelske hærs
evakuering fra Dunkerque i maj 1940!
I 1937 blev det besluttet at udvikle radio- og
pejleudstyr til at operere på frekvenser i VHF området ved frekvenser
over 30 Mhz. Det er karakteristisk får bølgeudbredelse i VHF-området, at
den foregår direkte mellem sende- og modtagerantenne uden reflektion som
i HF - området. I lighed med
de lidt forældede radarsystemer fortsatte Fighter Command alligevel med
de nu lidt forældede HF radiosystemer. En beslutning der bevirkede, at man
havde lidt forældede systemer i brug ved starten af Battle of Britain i 1940, men
til gengæld systemer, der var fuldt operationsdygtige og indøvede i hele
Fighter Command.
VHF t / r udstyret blev først indført som standard i
Fighter Command kort tid efter, at Battle of Britain var afsluttet.
4. Om Luftwaffe's radiopejlesystemer
4.1 Pejlesystemer for bombefly
Den tidligere engelske premierminister Stanley Baldwin
fremsatte i 1932 i en tale om fremtidens farer den påstand, at uanset
hvad man gjorde, ville fjendtlige bombemaskiner altid kunne slippe
igennem et forsvar og kaste bomber over landets byer: "The bomber will
always get through".
I årene efter 1932 blev der både i Tyskland og England
konstrueret jagerfly, der fløj væsentligt hurtigere og var mere
manøvredygtige end de efterhånden tungere
og tungere bombefly. Jagerflyene ville derfor kunne flyve om bag ved de
angribende bombefly, vende og indhente dem og skyde
dem ned, før de kastede deres bomber.
Værdien af udsagnet
"The bomber will
always get through" begyndte derfor at krakelere.
For at undgå
modpartens jagerfly og antiluftskyts kunne man lade
bombeflyene angribe om natten. Den oplagte modforanstaltning mod
natangreb var at mørklægge hele
landet, så besætningerne på flyene ikke ville kunne finde de mål, de ville
bombe.
For alligevel at kunne finde målene i mørke opstod
ideerne om
at udvikle navigationssystemer, der kunne lede et bombefly frem til et
mål uden nogen form for visuel landkending. Et sådant system ville også kunne bruges
i overskyet vejr.
Luftwaffe fik efterhånden udviklet tre systemer, der
blev kendt som : Knickebein, X-Gerät og Y-Gerät.
Udviklingen af Knickerbein var blot videreudvikling et
kendt navigationssystem - Lorenz. Lorenz var blevet udviklet i
begyndelsen af 1930'erne
for at hjælpe
rutefly med at finde vej - om natten og i usigtbart vejr - frem til en
given lufthavn. Ruteflyene fløj frem mod en radiosender, som stod i
forlængelse af den søgte lufthavns landingsbaner. Lorenz systemet blev brugt såvel
civilt som militært af både England og Tyskland i årene før Anden
Verdenskrig.
For at holde antenner på fly og sendere indenfor
praktiske dimensioner, var signalets frekvens (bærebølgen) valgt til
området omkring 30 Mhz,
svarende til en bølgelængde på 10 m.
Både Lorenz og Knickebein systemet arbejdede i
frekvensområdet 30 Mhz med overlejrede signaler, som kunne høres i samme
type radiomodtager.
Knickerbein, X-Gerät og Y-Gerät var systemer som
tyskerne decideret havde udviklet med det formål, at lede fly frem mod
et givet mål på fjendtligt område. Flyene fløj i dette tilfælde bort fra
systemernes sender.
Englænderne blev opmærksomme på Knickebein pejlesystemet i juni
1940, og
oprettede en særlig enhed i RAF, 80 Wing, til at træffe mulige
modforanstaltninger. Enheden fik til opgave at
opspore pejlesignalerne, finde ud af målene for signalerne, og så
vidt muligt gøre pejlesignalerne ubrugelige.
Enheden - 80 Wing - blev populært kaldt "the Beam
Benders", og dens kamp for at gøre de tyske pejlesystemer ubrugelige
over engelsk luftrum blev populært kaldt for "the Battle of the Beams".
De enkelte systemer og deres brug i årene 1940-41 er
omtalt herunder.
4.2 Knickebein
Knickebein var et radiopejlesystem baseret på at
stadfæste et mål som skæringspunktet for to smalle radiostråler fra hver
sin sender.
De to sendere var før juni 1940 anbragt i
Tyskland. Den ene sender lige syd for den danske grænse, og den anden lige nord
for den hollandske grænse, således at vinklen mellem de to radiostråler
var så stor som muligt i et givet skæringspunkt i England.
Begge sendere kunne sende en meget smal radiostråle ud i
en vilkårligt valgt retning i det horisontale plan, og de kunne på denne måde
sammen markere ethvert
mål i England som skæringspunktet for strålerne.
Som nævnt sendte Knickebein systemet ligesom Lorenz
systemet på en bærebølge med 30 Mhz.
Ved denne
høje radiofrekvens følger udbredelsen af radiobølgerne i det vertikale plan ikke
længere jordens krumning. Ved ca. 450 km fra senderen skal flyene
således op i ca. 6000 m's
højde for at opfange pejlesignalerne.
Højden 6000 m er det højeste
de tyske bombefly kunne flyve i, hvis de skulle have mulighed for også
at have bomber med. Så i praksis blev pejlesystemets maksimale
rækkevidde derfor 450 km.
Dette forhold bevirkede, at Knickebein systemet i praksis
var uanvendeligt over England, når begge senderne var anbragt i
Tyskland.
Men efter at tyskerne havde besat Holland, Belgien og
Frankrig i juni 1940, blev der
også oprettet sendere i disse lande, og dette forbedrede Knickebeins
muligheder for brugbare markeringer i England væsentligt.
Luftwaffes bombefly var allerede udstyret med
radiomodtagere
til at opfange og identificere
signalerne fra Lorenz systemet, og disse modtagere kunne ligeledes
opfange signalerne fra Knickebein systemet.
Strålingsvinklen i det horisontale plan kunne i praksis
ikke gøres mindre end 5 grader. Dvs. 250 km fra senderen er
strålen blevet ca. 21 km bred - det giver ikke mulighed for en særlig nøjagtigt
markering af målet.
For at give mulighed for større nøjagtighed indrettedes
hver sender derfor til at
sende samme radiosignal fra to antenner. De to antenner pegede
et par grader til hver sin side af den ønskede senderetning, og deres
radiostråler - hver med en 5 grader udstrålingsvinkel - bringes til at overlappe hinanden
med en vinkel på 0,3 grader. Det er nu dette overlapningsfelt, bombeflyene skal søge
efter. Dette felt vil have en bredde på under 1 km 250 km fra senderen
med de to antenner.
Se en illustration af overlapningssystemet, klik på
Knickebein
Hvordan konstaterer bombeflyet, at det er i
overlapningsfeltet? De to identiske radiosignaler får tilført et overlejret
lydsignal. Radiosignalernes bærebølge - de 30 Mhz - er identiske,
dvs. fra samme senderør, men det er
de overlejrede lydsignaler det ikke. Kun
i overlapningsfeltet hører man "summen" af de to lydsignaler. Da
lydsignalerne er forskellige, fortæller lydsignalet på hvilken side af
overlapningsfeltet bombeflyet befinder sig, og piloten kan korrigere
kursen derefter for at komme ind i overlejringsfeltet.
Som lydsignaler blev morsealfabetets prikker og streger
anvendt.
Når bombeflyene på deres vej langs den ene radiostråle
opfangede signalet fra den tværgående radiostråle, var de ved at være
over målet, og skulle gøre klar til at kaste deres last af bomber.
Når bombeflyet også var inde i den tværgående
radiostråles overlapningsfelt var de over målet og kunne kaste deres
bombelast. Bomberne ville så ramme indenfor en cirkel med en radius på
under 500 m, hvis flyets hastighed i forhold til jorden var vurderet
korrekt.
Knickebein var en let løsning på Luftwaffes
navigationsproblemer over England. Bombeflyene var i forvejen udstyret
med modtagere til Lorenz radiopejlesystemet, så de kunne finde tilbage
til deres base i mørke. De samme modtagere kunne bruges til at finde frem
mod målet i et Knickebein radiopejlesystem. Forskellen på de to systemer
var, at ved Lorenz systemet fløj man imod en sender, mens man ved
Knickebein fløj væk fra en sender.
Forudsætningen for at Knickebein systemet virkede, var
af besætningen på bombeflyet tydeligt kunne høre summen af de
overlejrede lydsignaler fra begge de to sendere, når de var over målet.
Problemet var bare, at RAF's 80 Wing hurtigt fandt
måder at afsløre radiostrålerne på, og sende radiosignaler på samme
bærebølge - de 30 Mhz - med overlejrede "støj"signaler, så besætningerne
på Luftwaffes bombefly ikke kunne konstatere, om de var i
overlapningsfelterne.
4.3 X-Gerät
X-Gerät systemet var ligesom Knickebein en videreudvikling af Lorenz
systemet. Ved X-Gerät var bombeflyene
i stand til at ramme målområderne mere præcist end ved Knickebein.
Udviklingsarbejdet var startet allerede i 1933.
Det var ved hjælp af X-Gerät systemet at Luftwaffe fandt frem til Coventry
i mørket ved bombeangrebet den 14.
november 1940.
På grund af det omfattede specialudstyr, det var nødvendigt at have i bombeflyene, blev
X-Gerät systemet i begyndelsen kun installeret på en enkelt gruppes bombefly - KGr 100 i Luftflotte III.
Denne gruppe (eng. pathfinders) markerede målet ved hjælp af brandbomber,
så de efterfølgende fly ikke behøvede et radiopejlesystem for at finde
målet.
Hovedprincippet i X-Gerät systemet var det samme som Knickebein systemet.
Men forskellige tilføjelser og forbedringer bevirkede, at X-Gerät systemet var
mere præcist og mere robust overfor støjsignaler udefra.
Den væsentligste ændring var, at systemet var baseret på
hele tre tværgående radiostråler.
Formålene med de tre tværgående radiostråler var bl.a. at
kunne beregne bombeflyenes hastighed i forhold til jorden og derved få
kastet bomberne mere præcist. Ulempen var, at der nu kun var en
radiostråle, der kunne benyttes til at flyve langs med mod målet.
Den første af de tværgående radiostråler bombeflyet
passerede på vej til målet var en meget bred stråle. der skulle alarmere
flyets besætning om at være klar til aktion. Flyet skulle rettes ind
nøjagtigt i overlapningsfeltet på den radiostråle, flyet fløj langs med. To informationer -
flyets højde og hastighed i forholdet til den omgivende luft -
skulle besætningen registrere på den automatiske bombekaster.
Når den anden meget smalle radiostråle blev passeret,
skulle den automatiske bombekaster aktiveres. Bombekasteren begyndte nu at registrere
den tid, der gik.
Når den tredje meget smalle stråle blev passeret, skulle
besætningen udløse bombekasteren. Tiden mellem de to sidste stråler
benyttede den automatiske bombekaster til at registrere den tredje information - flyets
hastighed i forhold til jorden. Som funktion af de tre informationer
frigjorde den automatiske bombekaster bomberne på det tidspunkt, de med den størst
mulige nøjagtighed ville ramme målet.
De modforholdsregler RAF's 80 Wing kunne stille op, var
de samme som ved Knickebein - nemlig at sende støjsignaler. Det var blot
ikke så nemt, som ved Knickebein. I radiomodtagerne på flyene havde
Luftwaffe indbygget effektive elektroniske filtre. Det betød, at kun signaler,
der var sendt
på den korrekte bærebølgefrekvens - ved X-Gerät 70 Mhz området - og
overlejret med lydsignaler på den korrekte overlejringsfrekvens 2 khz,
nåede frem til pilotens øre.
Ved angrebet på Coventry den 14. november 1940 sendte
80 Wing støjsignaler med en overlejrings-frekvens på 1,5 khz, der på grund Luftwaffes
effektive elektroniske filtre blev filtreret fra i flyets modtager, og derfor ikke
forstyrrede X-Gerät systemet den dag.
Inden Luftwaffes angreb på Birmingham den 19. november
1940 havde 80 Wing fundet den korrekte frekvens for det overlejrede
lydsignal, og de var i stand til genere X-Gerät systemet.
Ud over de nævnte forskelle fra Knickebein, opererede
X-Gerät som nævnt på bærebølgefrekvenser i 60-70 Mhz båndet. Det betød meget
mindre antenner i størrelsesordenen 5 m. Den højere frekvens bevirkede, at bredden af overlapningsområdet
kunne bringes ned til nogle få hundrede meter og målområdet til en
cirkel med en radius på under 200 m på en afstand af 250 km fra
senderne.
I løbet af november/december 1940 fik 80 Wing sat
støjsendere op foran alle vigtige byer, så X-Gerät systemet blev
kraftigt forstyrret, og mange bomber blev kastet langt fra målet.
Ved angreb på London og havnebyerne ved Den Engelske Kanal
kunne Luftwaffe imidlertid gennemføre angrebene med den nødvendige præcision uden brug af
radiopejlesystemer. Se evt.
Blitzen
4.4 Y-Gerät
Samtidig med udviklingen af X-Gerät udviklede tyskerne
et tredje radiopejlesystem Y-Gerät.
Dette system arbejdede kun med een radiostråle af
tilsvarende type som anvendt af Knicklebein systemet.
Systemet, der skulle installeres i bombeflyet var så
omfattende, at det på tilsvarende måde som ved X-Gerät kun blev
installeret i en enkelt gruppes - KGr 26's - bombefly. Denne gruppe
fungerede så som "pathfinders" på samme måde som KGr 100 ved X-Gerät.
"Pathfinder" flyet fløj parallelt med radiostrålen frem
mod målet. Samtidigt hermed kontrollerede et kommandocenter på tysk
besat område afstanden til flyet. Denne afstandsmåling trådte i stedet
for den tværgående radiostråle, som blev anvendt ved Knicklebein
systemet.
Når flyet nærmede sig målet sendte kommandocentret
meddelelse til flyet om at komme ind i radiostrålens overlapningsfelt.
Når flyet var inde i radiostrålens overlapningsfelt, og samtidig var
nået ud på den
korrekte afstand fra kommandocentret, sendtes signal til at kaste
bomberne. Bomberne markerede bombemålet for de efterfølgende
bombefly ved det antal brande, de antændte med deres brandbomber.
Kommandocentret målte afstanden til bombeflyet ved
gentagne gange at sende et radiosignal. Flyet opfanger signalet og
sender så automatisk at svarsignal på en anden frekvens. Den tid, det tager
signalet at nå frem til flyet, sende retursignalet og for retursignalet
at nå tilbage til kommandocentret er proportional med afstanden til
flyet.
Under tyskernes afsluttende forsøg med systemet var det
lykkedes RAF's 80 Wing at afsløre afstandsmålingens frekvenser - hhv.
43 Mhz og 47 Mhz.
Allerede ved de første bombeangreb i marts 1941, hvor
Y-Gerät skulle benyttes som navigationssystem, var 80 Wing i stand til
at udsende falske afstandssignaler, så systemet blev delvis ubrugeligt.
Ifølge note 190 startede Luftwaffe 89 Y-Gerät styrede
bombeangreb i marts 1941, heraf kastede bombeflyene kun i 18 tilfælde
deres bombelast styret af Y-Gerät systemet.
Samtidig med at Blitzen sluttede i maj 1941 standsede
tyskerne brugen af Y-Gerät ved bombeangreb.
Et modificeret X-Gerät system blev anvendt ved senere
angreb mod England.
5. Enigma
og Ultra Intelligence 38
5.1 Indledning
Enigma er navnet på en tysk krypteringsmaskine. (Ordet
enigma er græsk og betyder gåde.) Den blev
i forskellige versioner benyttet af den tyske hær (Heer), den tyske
flåde (Kriegsmarine) og Luftwaffe.
Især Kriegsmarines Enigma system var væsentligt forskelligt og stærkere
krypteret end Heers og Luftwaffes.
Så vidt det er muligt, sender et lands militære enheder
kritisk information om forestående aktioner og ordrer af sted med en
kurer, eller de sender informationen ved hjælp af telefon/telefax
systemer baseret på kabelforbindelser.
Kabler på fjendens eget område er det i praksis umuligt
systematisk at opsnappe oplysninger fra.
Men hvis de enheder, der skal modtage informationen,
hele tiden flytter sig, kan det ikke lade sig gøre for militærledelserne at oprette nye
kabelforbindelser hurtigt nok. Det bliver så nødvendigt at benytte
radiokommunikation. Men her kan fjenden lytte med. For at undgå at
kritisk information på denne måde falder i fjendes hænder, må kritiske
meddelelser via radio altid krypteres. Til det formål havde det tyske
militær krypteringsmaskinen Enigma.
Enigma blev benyttet under Hitlers angreb på Vesteuropa
i maj 1940 og efterfølgende under Slaget om England.
5.2 Enigmamaskinens opbygning
Maskinen var elektromekanisk, da man i 1940 ikke havde
brugbare elektroniske databehandlingssystemer. Det første programmerbare
elektroniske databehandlingssystem Colossus var først klar i England i
1944.
For brugeren var Enginamaskinen nærmest som en slags
skrivemaskine. Efter at have startet maskinen op efter en speciel
(hemmelig) forskrift i maskinens kodebog, blev meddelelsen tastet ind på
et alfabetisk tastatur, og ud kom meddelelsen bogstav for bogstav i krypteret form.
Den krypterede meddelelse blev nu af en telegrafist afsendt som
morsesignaler over radioen. Under krypteringen skiftede hvert
bogstav til en ny kode efterhånden som indtastningen skred frem.
Den telegrafist, der modtog morsesignalerne, tastede de
alfabetiske tegn ind på en Enigma maskine opbygget og indstillet
på samme måde som den Enigma maskine, signalet var blevet krypteret på.
Ud
kom teksten bogstav for bogstav nu i normalt sprog igen.
Princippet var baseret på 3 eller 4 kodehjul og et
kabelbaseret omstillingsbord. Jo flere kodehjul, der sættes i serie, jo
mere kompliceret bliver det at bryde algoritmen for den kontinuerlige
ændring af kodesignalerne for hvert bogstav.
En beskrivelse af, hvordan krypteringen rent teknisk foregik på Engima
maskinen, kan findes på fx Wikipedia ved i den danske version af Google
at taste Enigma, eller bedst på siden
www.matematiksider.dk/enigma.html .
De tre tyske værn, Heer, Kriegsmarine og Luftwaffe, havde hver sin version af maskinen, men den
tyske flådes var den mest sofistikerede. Det var også den tyske flåde,
der ved hjælp af informationer udvekslet via Enigma krypteringssystemet bibragte England
kolossale tab af fragtskibe. Det var fragtskibe på vej til England lastet med krigsmateriel og
livsnødvendige forsyninger. Kriegsmarine kunne - under dække af
krypterede meddelelser - styre sin store flåde af ubåde til angreb på
konvojer af fragtskibe og modtage observationer fra ubådene om
observerede konvojers positioner. I perioder i 1940-42 var ubådene på nippet til
at få etableret en effektiv blokade omkring England.
5.3 Enigma systemets betydning for luftkrigen over England
1940-41
I modsætning til Kriegsmarine kunne Luftwaffe sende sine kritiske informationer til tyske flyvestationer
i Vesteuropa via telefon/telefax over kabelforbindelser. Der gik ikke
mange dage efter, at en flyvestation var blevet etableret på et besat
område, før en kabelforbindelse var etableret til Luftwaffes
hovedkvarterer.
Alligevel fandt Luftwaffe det ofte formålstjenligt, at
sende vigtige kritiske meddelelser til flyvestationerne over radio.
Radiomeddelelserne blev opsnappet af radiostationer i
England og videresendt til Secret Service's Code and Cipher School i
Bletchley Park, i det efterfølgende blot kaldt Bletchley Park.
Bletchley Park dekrypterede meddelelserne og videregav
dem bl.a. til chefen for Fighter Command Air Chief Marshal Dowding. Under
Battle of Britain var Dowding en af de få personer i England, der modtog
dele af den mest hemmeligstemplede dekrypterede information "Ultra Intelligence" 38.
Meddelelserne,
Dowding modtog, var af strategisk betydning for Battle of Britain, idet
de bekræftede, at tyskernes hovedmål med luftangrebene i august 1940 var
at nedkæmpe Fighter Command178.
Dette fik Dowding til at holde fast ved en ekstrem defensiv strategi. Se
evt.
Forsvarsstrategien.
Meddelelserne var dog af begrænset taktisk værdi for
Fighter Command ved de daglige angreb af flere årsager 177:
-
Det tog tid - af og til op til mere end en dag - at
afkode
meddelelserne, og det angreb, meddelelserne drejede sig om, kunne
være udført, når Fighter Command fik meddelelserne.
-
Dårligt vejr for et flyangreb betød ofte, at et
planlagt angreb måtte udsættes med meget kort varsel. Det var ikke givet, at den nye
dato for angrebet blev sendt ud via radio. Ex. luftangrebet på
London den 15. september var blevet afkodet til at skule være
foregået den 12. september. Vejret var dårligt, og angrebet blev
udsat, men der blev ikke afkodet nogen meddelelse om, at det
i stedet skulle foregå den 15. september.
-
Fighter Commands jagere kunne før sommeren 1941
ikke finde tyske fly i mørket selv om de var adviseret om et
angreb, og deres
radarstationer kunne lokalisere angrebet. Se evt.
Blitzen.
-
For ikke at afsløre overfor Luftwaffe, at deres
koder var blevet brudt, måtte England ofte undlade at reagere på
informationerne.
I modsætning til Bletchley Parks indsats mod
Kriegsmarine har deres indsats mod Luftwaffe ikke skaffet Fighter Command så
afgørende oplysninger, at det kunne have haft betydning for udfaldet af
Battle og Britain.
At chefen for Fighter Command Air Chief Marshal Dowding
som den eneste indenfor Air Ministry's område modtog Ultra
Intelligence fik en for ham uhensigtsmæssig bivirkning. På et møde i Air Ministry den 17. oktober 1940 blev han og chefen for Group 11 Air
Vice-Marshal Park kraftigt kritiseret og stærkt ydmyget for deres
ledelse af Battle of Britain. Dowding kunne ikke bruge vigtig
information om den aktuelle situation uden at afsløre sit kendskab til Ultra Intelligence. Først i 1974 - efter hans død - blev det
overfor omverdenen afsløret,
at han var modtager af Ultra Intelligence 38.
Ud over Enigma-krypteret information indsamlede Secret
Intelligence
Service andre former for mindre kritisk information om Luftwaffe, der var med til at
give et billede af Luftwaffes styrke og hensigter.
Den 17. september 1940 afkodede Bletchley Park en
meddelelse på "Ultra Intelligence niveau" fra Hitlers
generalstab til Luftwaffes kommandocenter i Amsterdam. Meddelelsen
drejede sig om, at Luftwaffe kunne disponere over de transportfly, der
skulle være anvendt ved invasionen, på en anden måde. Dette kunne kun
tolkes, som invasionen var udsat til næste forår på grund af det
kommende efterårs- og vintervejr, eller den var helt aflyst. Se evt.
Seelöwe
Sea Lion.
Noter
|